 |
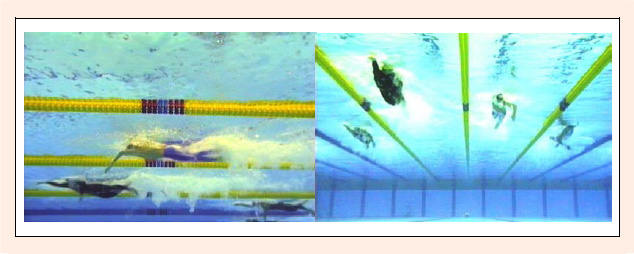
Figure 10.
Images recorded by the side camera (left) and the front camera (right) at the same instance. The hand position and orientation are calculated from the images with direct linear transformation method (Takagi, 1997). The swimmer A is the lead swimmer with the black full-body swimsuit, and B is the second swimmer with the purple long spats.